Tic-Tac-Toe Robots
CS-0133: Human-Robot Interaction (HRI) – Final Project
Background
With the increasing prevalence of robots in society, it is imperative that we establish norms and policies for HRI interactions. Users should feel that robots are competent and capable of communicating without the effects of the uncanny valley phenomenon. Many studies have covered one-on-one interaction types, but group dynamics are seldom explored — especially ones where one human is interacting with a group of robots.
In the desire to study social norms and comfort in group interactions, we investigated the role of gestures and timing. The objective of our study was to understand the impact of the synchronicity of arm movements with dialogue on people’s perception of robots in a group interaction. We conducted trials with 12 participants entailing a game of tic-tac-toe played out in three different scenarios: synchronized gestures, semi-synchronized gestures, and completely unsynchronized gestures with the robot dialogue. After each trial, participants answered survey questions and provided their thoughts on the experience.
Method
This experiment required three robots with mobile arms capable of dialogue, as well as a surface to play tic-tac-toe on. The robots only needed to be able to move their arm in one degree of freedom as they would be instructing the human participant to draw the X’s and O’s.
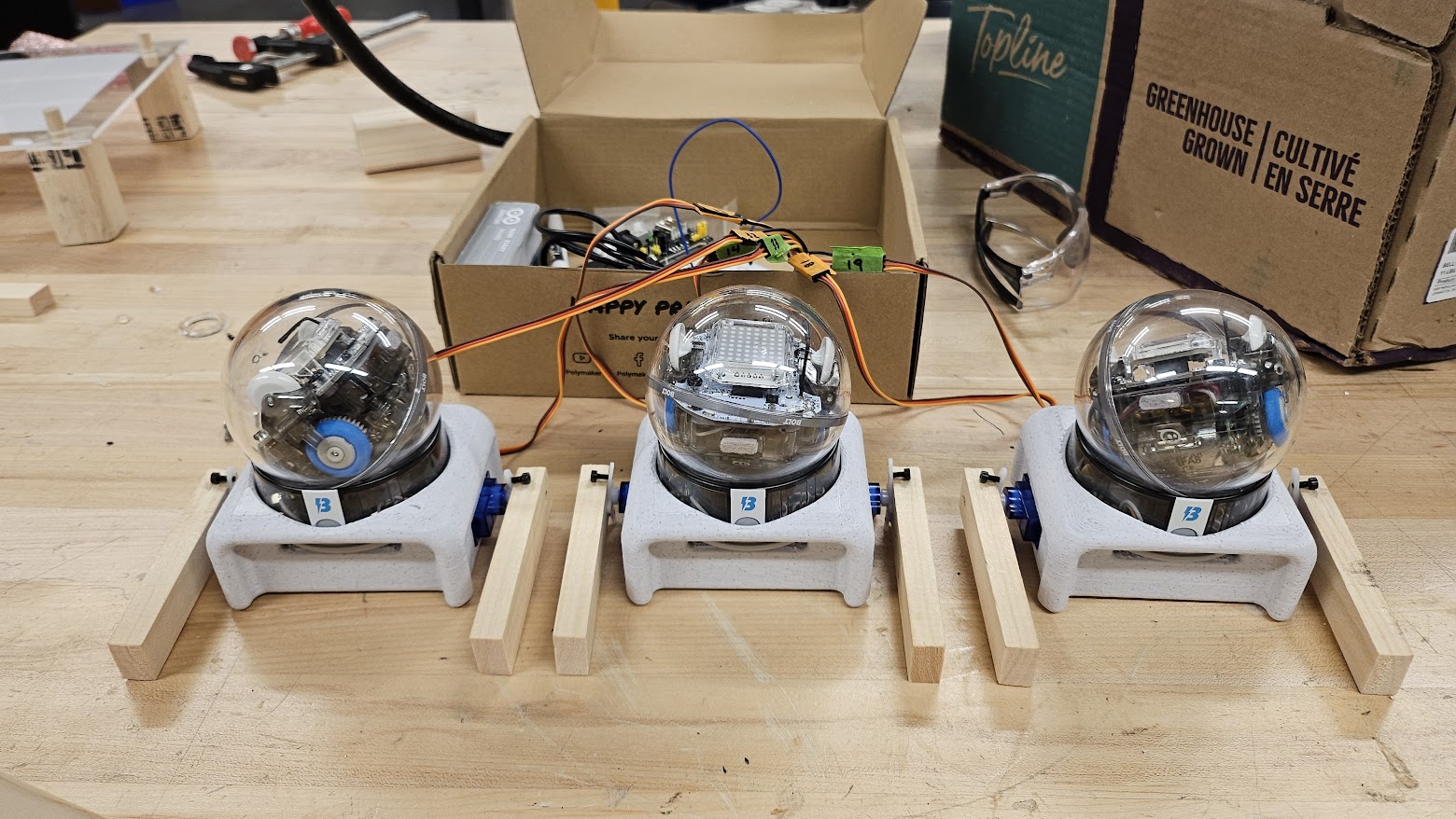
I served as the designer and fabrication lead for this project, responsible for the CAD modeling and physical development of the robots. The assignment required a pre-existing component, so I used Sphero educational robots to serve as the head, the dock that it comes with nested into the body to serve as a neck, and planned to fabricate the rest of the body from stepper 3D printing, woodworking, and stepper motors for the arms. The initial CAD models made on OnShape can be seen below.
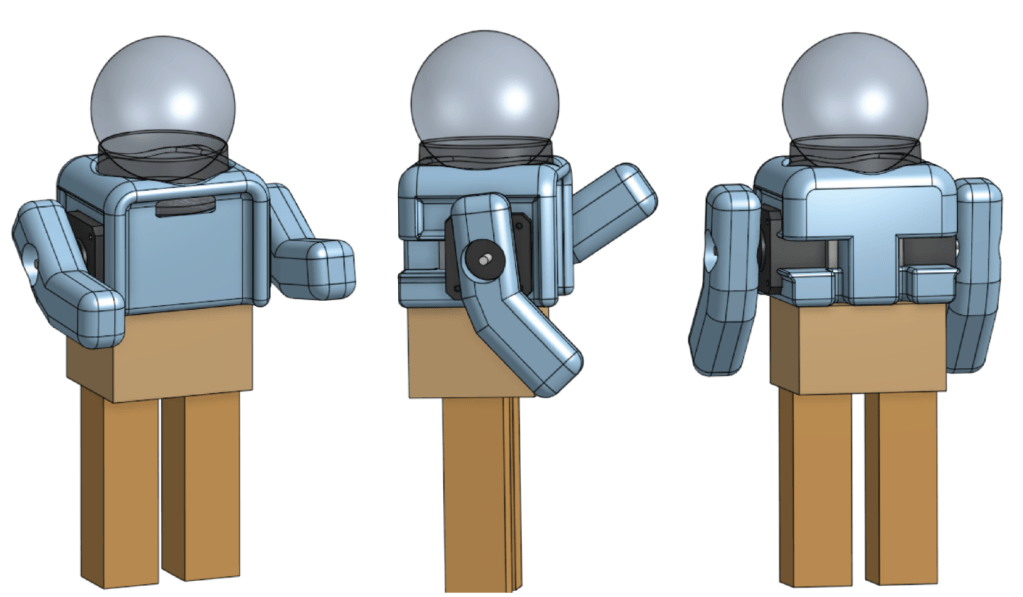

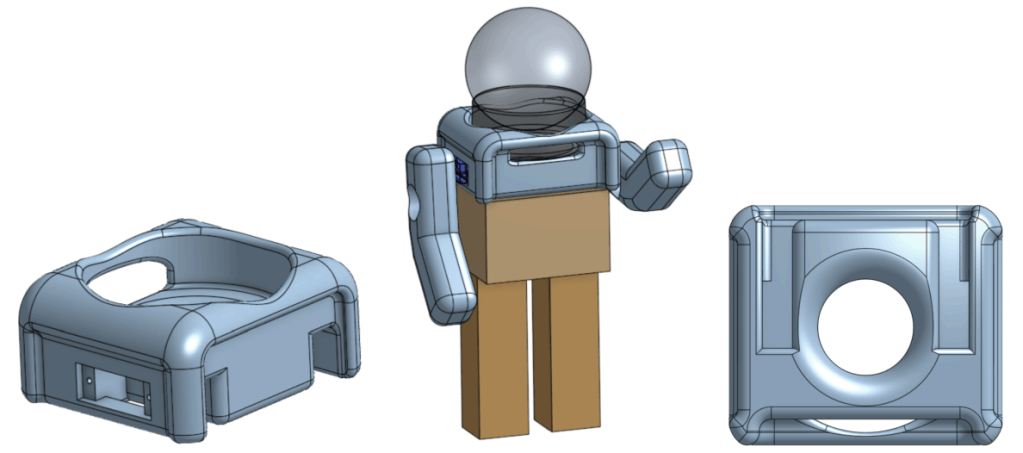
With a deficiency in stepper motors and a surplus of smaller servo motors, we decided to change the design to use servos for the arms instead. This reduced the size of the bodies and the amount of filament needed to print them. Using filets and inset surfaces, I reduced the volume of the chest pieces as much as possible to reduce waste produced from this project. The images below show the second and final iteration of the body. It is less than half the height of the first iteration of design. We also decided to use wood for the arms instead of printing them, as lightweight balsa would require minimal support to attach to servo motor attachments.
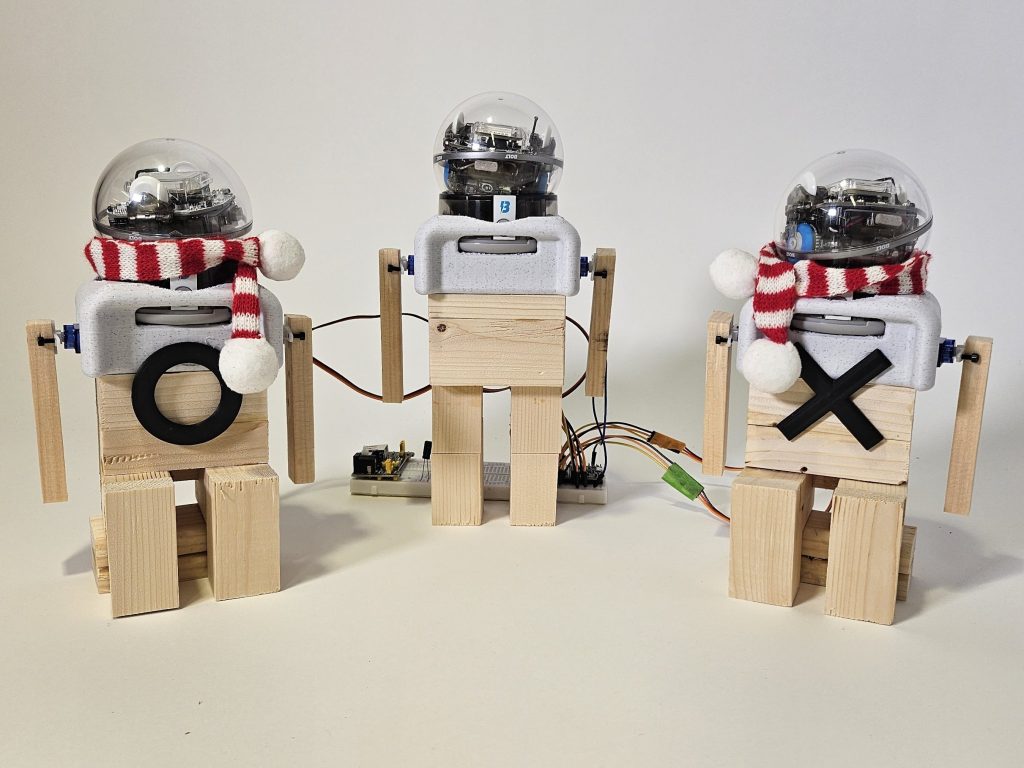
We used an ESP32 to control the movement of the 6 individual servo motors. One challenge we faced was that the motors would stall out when more than 2 were connected to the ESP32 at a time. We initially suspected an issue with the power source but discovered that, although the servos were all individually grounded, a common ground was not established between the controller and the servos. This was quickly fixed and no further issues were experienced. The program was written in Arduino and designed to take inputs from the research team during the experiment to control which scenario sequence will be run. The tic-tac-toe board itself was made by cutting out a clear acrylic square, using wooden blocks and small dowels to form legs for the table. The two robots playing the game sat on the sides, while the third remained standing as a spectator. Once the physical fabrication and motor control was complete, we wrote the dialogue and designed the behaviors of the robots for each of the three scenarios.

Our test subjects were given a short introduction to the topic but were not told the experiment question being studied. They were introduced to the set-up and given an expectation for the behaviors of the robots to mitigate the effect of surprise and time needed to become familiar to the setting. They were given this survey throughout their trials and a final questionnaire at the end to gauge their overall reaction to each of the three scenarios in comparison.

Results and Discussion
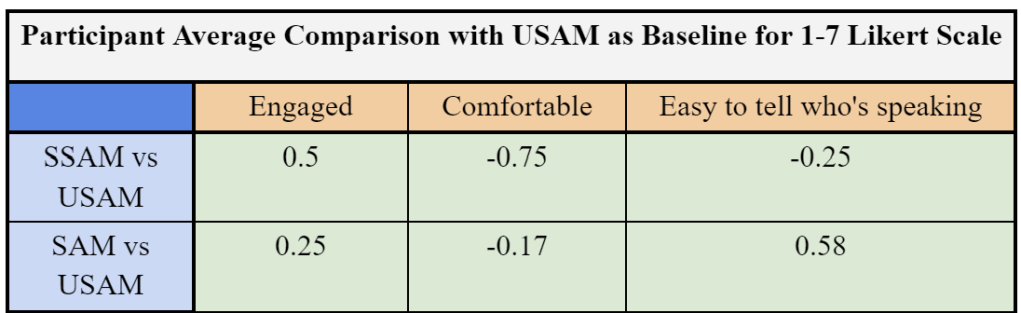
At a glance, it is interesting to see that there is not a clear-cut correlation between synchronicity and user comfort, engagement, or ease of telling who is speaking. While we may have expected synchronicity to automatically improve interactions, this was not the case.

Fully synchronized arm movements were undoubtedly beneficial in helping subjects identify the correct speaker. However, arm movements that were slightly out of sync (somewhat synchronized) may have been more disruptive than completely unsynchronized arm movements. One theory is that since unsynchronized arm movements were completely unrelated, they were easier to ignore, and therefore less distracting to determine which robot was talking when compared to the somewhat synchronized arm movements.
Oddly enough, the participants were on average more comfortable with fully unsynchronized arm movements. There were some comments about how the robots were “creepy” or “unsettling”. We suspect that the somewhat synchronized arm movement (arms moving slightly before or after speaking) must have been more unsettling than either fully synchronized or fully unsynchronized movements.
Participants reported being more engaged in the somewhat synchronized arm movements than others. This may be due to the order in which we ran these trials (SSAM > SAM > USAM), with participant engagement decreasing with each trial as they get accustomed to the robots and the novelty wears off.
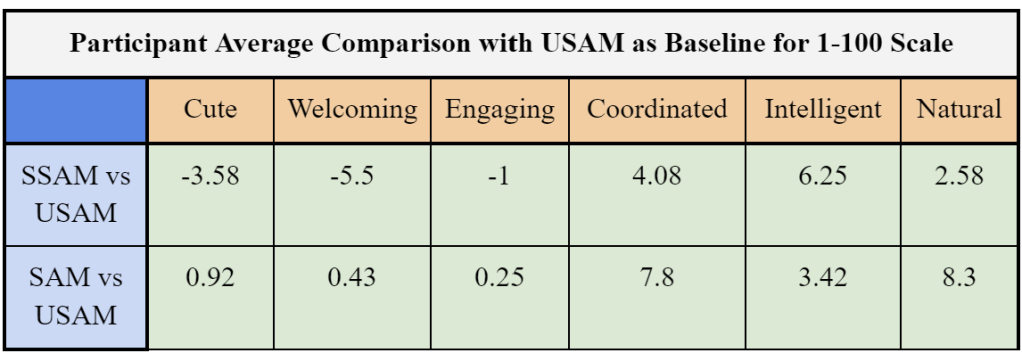
The chart above shows the average differences in keyword resonance between the scenarios, analyzed in the same manner as the Likert scale questions shown previously. As expected, robots with fully synchronized arm movements are seen as the most natural and coordinated. The resonance with these two keywords is lower with somewhat synchronized arm movements but is still higher than with unsynchronized arm movements.
Fully synchronized arm movements also have an edge over other trials when it comes to how engaging, welcoming, or cute they are. However, it seems like somewhat synchronized arm movements perform significantly worse in those three metrics when compared to both fully synchronized and unsynchronized trials. This may be due to the aforementioned “unsettling” factor of having robots that were almost natural and human-like, but just slightly off-putting.
When it comes to how intelligent the robots seem, the fully coordinated arm movements may have humanized the robots a bit too much and lost the calculative nature usually associated with robots in favor of cuteness and warmth.


Additional interesting observations made, though not data intended for analysis, was that some of the subjects would mimic actions of the robot that they found humorous or particularly emphatic. The figure above show a subject raising their arms after the robot gestures.
Conclusion
In this study we aimed to determine the impact of the synchronization of arm movements with speech on human perception of robots. After analyzing participant responses, it was found that synchronized or slightly synchronized arm movements were perceived by people as most natural and coordinated. Furthermore, people maintained eye contact with the speaking robot most frequently when their arm movements were synchronized with speech. Finally, the majority of participants felt that the synchronization of arm movements impacted their perception of the robots. Therefore, when designing robots it is important to consider the timing and action of arm movements since they play a significant role in human interaction. Increased arm movement can help humans feel that robots are more natural, but one must carefully design these movements to ensure they do not instead cause an adverse reaction.
Media
In-class presentation:
The full report can be found here: